

微信二维码
0571-86226620
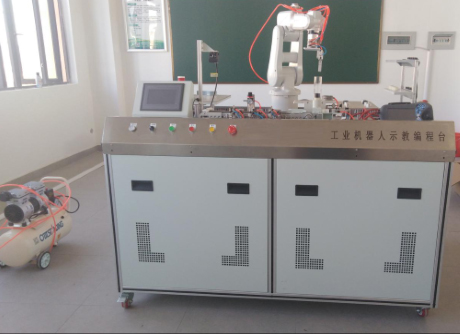
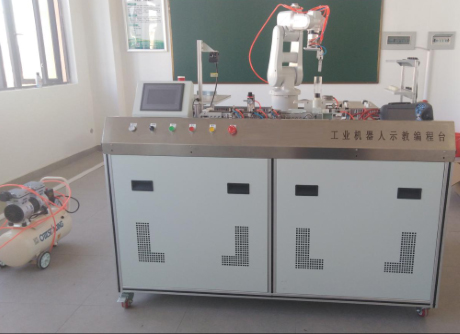
GLIR-1C型工业机器人传感综合控制平台包含了搬运码垛、视觉分拣、运输、入库等工艺过程。同时工作站集成配套了离线编程软件,软件中内嵌工作站三维模型环境,可以直接实现计算机辅助编程应用。
2012年7月发布的《"十二五"战略性新兴产业发展规划》指出,在智能制造装备产业要大力推进自动控制系统、工业机器人、关键零部件等装置的开发和产业化,开展基于机器人的自动化成形与加工装备生产线、自动化仓储与分拣系统以及数字化车间等典型智能装备与系统的集成创新,推进智能制造技术和装备在石油加工、煤炭开采、发电、环保、纺织、冶金、建材、机械加工、食品加工等典型领域中的示范应用。
工业智能制造实训系统重点研究智能化生产系统及过程,主要涉及整个企业的生产物流管理和人机互动在工业生产过程中的应用。同时结合企业生产物流运营模式,结合学校电子技术、机电一体化、电气自动化、生产管理、物流管理及其相关专业现阶段建设情况,以及工业智能工厂实验室规划理念,进行综合且专业化的设计,以工业4.0和“互联网+”模式为实训教学研究载体,构建一个高端精细化实体制造企业运作模式的实验室。
GLIR-1C型工业机器人传感综合控制平台包含了搬运码垛、视觉分拣、运输、入库等工艺过程。同时工作站集成配套了离线编程软件,软件中内嵌工作站三维模型环境,可以直接实现计算机辅助编程应用。适合职业院校、技工学校自动化类相关专业《工业机器人与控制技术》、《自动化技术》等课程的实训教学,适合自动化技术人员进行工程训练及技能学习。
1.输入电源:单相三线 AC220V±10% 50Hz;
2.工作环境:温度-10℃~+40℃ 相对湿度<85%(25℃) 海拔<4000m;
3.GLIR-1C型工业机器人传感综合控制平台装置容量:<3kVA;
4.外形尺寸:2000mm×1200mm×1500mm;
5.安全保护:具有接地、漏电压、漏电流保护,安全指标符合标准。
(一) IRB120六自由度机器人工作站
由机器人本体、机器人控制器、示教器等组成。
1、工业机器人本体

机器人负载≥3kg工作半径≥580mm,工作范围轴1 +165°~ -165°速度250°/s轴2 +110°~ -110°速度250°/s轴3 +70°~ -90°速度250°/s轴4 +160°~ -160°速度320°/s轴5 +120°~ -120°速度320°/s轴6 +400°~ -400°速度420°/s ;TCP速度不低于6.0m/S,加速度不低于28m/s;重复定位精度≤0.01mm;集成不少于10路信号源,4路气源。机器人可任意角度进行安装。
2、机器人控制器

IRC5是ABB第五代机器人控制器,采用RAPID工业机器人编程语言;内置数字量不少于16DI/16DO;可扩展电子限位开关、5路安全输出(1-7轴监测)等安全选项;提供SafeMove功能,可实现静态、速度、位置、方向监测(机器人及附加轴)和至少8路功能启动安全输入和8路监测输出;配套PROFINET工业以太网通讯组件;电源电压单相222V,频率50Hz/60H;工作环境温度范围0℃~ +45℃;工作环境相对湿度95%(无凝露)。
3、机器人示教器

采用图形化彩色触摸屏,触摸屏不小于6.5寸,至少有10个键薄膜键盘、1个急停按钮,功能可自定义;配备操纵杆,可控制多个轴运动;能够进行热插拔,运行时可插拔;支持,和机器人本体配套,示教盒控制电路的主要功能是对操作键进行扫描并将按键信息送至控制器,同时将控制器产生的各种信息在显示屏上进行显示。
4、底座
采用优质铝板,尺寸250mm×250mm×15mm。上面配置工业导轨,可以有效的进行位移。
5、离线编程仿真软件(RobotStudio基本版)

提供所选的RobotStudio功能,如配置,编程和运行虚拟控制器。还可以通过以太网对实际控制器进行编程,配置和监控等在线操作。
(二) 快换工具

搬运手爪工装

双吸盘工装
1、工具快换系统:机器人手臂安装有法兰端快换模块,可实现不同工具间无需人为干涉自动完成切换,6路气动信号,额定负载5kg,厚度38mm。
2、夹爪工具:含有工具端快换模块与法兰端快换模块配套,可稳固抓取搬运码垛物料,夹头为铝合金材质,采用气动驱动,重复精度±0.01mm,闭合夹持力45N,开闭行程10mm。配有握力传感器可以在触摸屏上显示当前握力。
3、吸盘工具:含有工具端快换模块与法兰端快换模块配套,结构为铝合金材质,4mm直径吸盘1个,20mm直径吸盘2个,可稳固抓取各种形状的芯片零件及盖板。
(三) 码垛单元

1、原料台由铝型材配合导槽构成,利用高度差实现物料自动排列,可满足多个物料的存储。
2、码垛台由台面和支撑构成,台面为POM,尺寸140mm×110mm×10mm,采用铝合金型材支撑,高度160mm,可满足多种形式的码垛。
3、包含模拟物料,材质PVC,数量6个,采用工形设计方便夹爪夹持,可实现在两个码垛台间的搬运、码垛实训。
模拟流水线单元:
1、包含一个多功能料井,铝合金材质,兼容三种不同形状(正方形、长方形、圆形)的物料块,能以固定的姿态到达料井底部;
2、料井侧面采用反射型光纤传感器,
3、包含一个自动上料装置,采用双杆气缸驱动,气缸缸径10mm,带磁性开关,能实现物料从料井到传送带的上料动作;
4、包含一条输送装置,能实现物料传送功能,输送线长600mm,宽50mm,采用步进电机驱动,电压24V;
5、采用平带传动,能调节皮带松紧;
6、输送带末端有物料到位检测传感器,为漫反射型光电传感器,PNP输出,检离距离100mm;
7、包含废料去除装置,采用笔形气缸驱动,缸径10mm;
8、尺寸520*640*300mm;
9、台面采用铝合金材质,表面氧化处理
输送线是本套设备中的基本单元,由铝合金型材、皮带输送机构、齿形传送链、滚轮输送机构、护栏、光电传感器、物料定位机构等组成,传输线由PLC控制步进电机驱动,可控制范围内的任意速度。各物料定位机构使各物料在工作区域准确定位停止,实现相应的检测工序。
(四) 视觉检测单元

视觉检测单元分为形状识别和颜色识别两部分。
形状识别模块:
1、检测项目:形状搜索II、搜索、灵敏搜索、边缘位置、边缘宽度、边缘个数,面积、色平均/偏差、标签;
2、能同时测量的数量32;
3、场景登录数32;
4、带有单次测量输入信号,以及组合控制指令输人信号;
5、带有数字量输入输出交互信号。
(五) 立体仓库

立体仓库采用工业标准钢板加工而成,外表面喷涂彩色环氧聚塑,共有2层6列12个仓位,仓位安装多个检测装置,检测仓位状态。
1、单层共2个料区,可分别用于存放。
(六) 操控面板
1、工作站启动、停止、模式控制和急停按钮,可实现对设备运行操作;
2、故障及设备运行状态指示灯;
3、多个电路信号及气路信号的快接插口,可以方便完成电气接线及调试训练;
4、包含工业HMI触摸屏作为人机交互接口,TPC7062TX,是一套以先进的Cortex-A8
CPU为核心(主频600MHz)的高性能嵌入式一体化触摸屏。该产品设计采用了7英寸高亮度TFT液晶显示屏(分辨率800×480),四线电阻式触摸屏(分辨率4096×4096)。同时还预装了MCGS嵌入式组态软件(运行版),具备强大的图像显示和数据处理功能。
(七) 总控系统
1、采用西门子新一代PLC S7-200smart实现集成控制,国际知名品牌,模块化设计,可进行I/O模块化扩展,提供RS485接口,共包含数字量44点输入/40点输出。
2、电气控制元件采用国内知名品牌优质产品,包含滤波、短路保险等安全机制。
3、工作台正面提供运行安全装置,采用光栅传感器,光轴数量8,光轴间距40mm。
4、操作过程可通过摄像头采集记录,焦距2.8mm,焦段广角,清晰度720p,感光面积1/3英寸,IP66防水防尘,可通过WiFi连接云端监控,监控信息可存储在扩展存储卡中。
5、供气系统功率750W,排气量60L/min,压力0.7MPa,储气罐30L,静音无油,配套知名品牌气路控制元件和真空元件。
(八)GLIR-1C型工业机器人传感综合控制平台 工作台架
1、铝合金框架,双抽屉结构,抽屉上放置网孔板,用于安装电气器件;
2、整体尺寸:2000mm×1200mm×700mm;
3、安装台面为铝合金T型槽,台面尺寸2000mm×1200mm,厚度20mm;
4、底部安装有万向脚轮和固定支撑,方便移动和固定。
(九)气动控制实训单元
包含静音空压机,调压过滤器、气阀以及电磁阀,各部件应满足;
1、静音空压机:
(1)电源电压220V,额定功率750W;
(2)容积流量60L/min,储气罐容量30L;
(3)转速1360r/min
(4)压力7har,噪音68db。
2、调压过滤器
(1)调压范围0--0.8MPa;
(2)过滤精度5um;
(3)使用压力1.0MPa。
3、气阀:
能控制气路的通断。
(十) 配套工具
提供安装、调试工作站所需工具一套,包括:工具箱1个、内六角扳手1套、250mm活动扳手1把、螺丝刀1套、3米卷尺1个、斜口钳1把、Y型端子钳1把、裸端型端子钳1把、剥线钳1把、美工刀1把、万用表1个、PLC编程线1根、触摸屏编程线1根。
任务一 机械及电气安装调试
(1)工业机器人工具快换系统的安装及调试
(2)检测单元机械装配、传感器电缆接线和气路连接
(3)PLC控制系统的I/O接线
(4)工业机器人的工作原点姿态
任务二 工业机器人维护及操作
(1)工业机器人微校操作
(2)转数计数器更新操作
(3)工具TCP标定
任务三 产品码垛
任务四 产品入库
任务五 视觉系统的应用
(1)工业视觉系统组成与连接
(2)工业视觉系统检测过程实验
(3)视觉系统与工业机器人综合应用
任务六 传感设备调试
(1)机器人握力的实验
(2)机器人位移实验
(3)机器人手臂加速度实验
(4)位移传感实验
(5)各类电机原理与应用
(6)传感器原理与选项
(7)系统各传感器安装与应用

GLIR-1C型工业机器人传感综合控制平台http://gaoliantech.cn/home/category/detail/id/223.html
浙江高联电子设备有限公司
公司地址:杭州市钱塘新区新湾街道
电话:0571-86226620
手机:13588205900
邮箱:zhejianggaolian@163.com
微信号/QQ号:284024184


Copyright © 2020 浙江高联电子设备有限公司 浙ICP备19014452号-3


微信二维码